A rather unattractive person told me, "Racing is an infection. Once it gets in your blood, there is no getting it out." This certainly holds true. From the first time I said "Wwweeeee", but as a small child so "Wweeee" I knew I could never legitimately stop wanting to race something.
So after more than two years, I'm not only starting up this blog, but I am racing again. This time I am actually in a league, so this is going to be literally the best year of my life to date. The title was not meant to mislead, I am indeed changing gears because I am no longer driving karts. I said 'to hell with it', I actually said these words. Did my research, grabbed a coworker, went to a near-by dealership and bought Angela. A Kawasaki Ninja 300.

But rather than give you a story of my last year riding motorcycles, I'm just going to jump to the chase. After 4 1/2 months of riding, I decided I needed to start racing again, and bikes were going to be my outlet...
Race the 300? Nope... it costs too much to replace 5-6x a year.
So what to race? Minibikes were the final result.
So I took a class. For $50 they lend me a suit, a bike, and gave me a solid 2 hours of instruction on how to man-handle the tiniest bike known to man, and it was the most educational 2 hours ever.


In my first weekend... I crashed 11 times. That wasn't a typo.
fun fun... but im not exactly a small person... so the actual race was not bringing in the ladies.
Having enjoyed myself I went out and bought a CRF50 of my very own to go racing on... I seriously underestimated how bad I am at this. But so what, I had just completed my first legitimate race and it was excellent!

That's me... last off the start line since I outweigh everyone by about 40-80 lbs, at the first corner, I was already 5 seconds behind. I received the nick-name "Crash" that weekend.
And some video of the race:
M1GP 2013 Round 7 (Santa Maria) 50cup Full Race from M1GP on Vimeo.
That was all good an fun, but anyone who is willing to crash 11 times in a weekend is surely insane and willing to try something way above his own head right?
That's absolutely right!
So what better way to learn how to race than to do a lot of it. So with precisely 1 race under my belt on the CRF50... I decided to join a team for a 24 hour race on an NSR50... now the names don't mean much to most so let me put two pictures side-by-side.


The CRF is exactly as it would appear in the pics above... it is a bike for 5 year olds. The NSR is an actual race bike with a small motor. Even though it is the same size engine, it produces 2x the horse-power, but more importantly, it handles like a dream!
Now this bike was the team's bike and we'd barrowed it from one of our competitors who was cool enough to lend it to us... But, with virtually no racing experience, I proceeded leaped face first into a proper race and managed to log 5hrs and 30 minues of those 24 hours and completed on the order of 450 laps... I was tired. It was miserable, it was cold, it was exhausting, and I will definitely do it again. Quite the experience.


But Mark, surely there are tales to tell of that race? There are, lots of funny tales, but I'm more interested in the future... the future is my own first season of racing. With my own NSR50 of my very own.
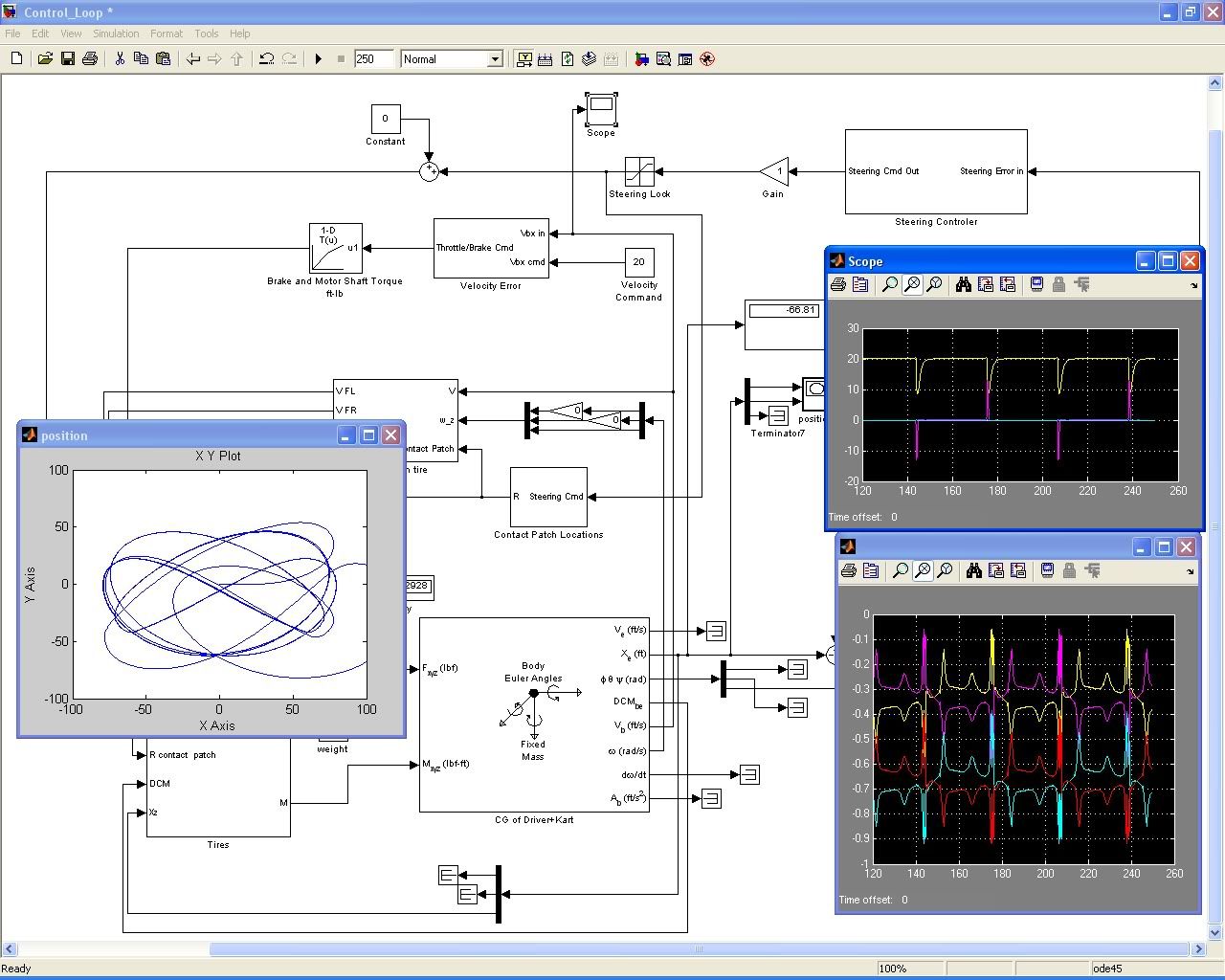
THUS this blog will continue to same technical discussions as before about the karts, but now it the dynamically complex world of motorcycles. I have spent about a year now just coming to grips with how tied together everything is on these machines of beauty, and while the karts to super fast and super aggressive, nothing can shake a stick at the fun and complexity of a motorcycle.
So I will end this first rebooting post with a short video of me taking out my new baby, Wren, out on the track. Onwards and follow the shiny Golden Helmet!
PS: I thought the helmet was yellow when I tried to buy it online, but it was too ridiculous to send back. So I went with it.
So after more than two years, I'm not only starting up this blog, but I am racing again. This time I am actually in a league, so this is going to be literally the best year of my life to date. The title was not meant to mislead, I am indeed changing gears because I am no longer driving karts. I said 'to hell with it', I actually said these words. Did my research, grabbed a coworker, went to a near-by dealership and bought Angela. A Kawasaki Ninja 300.
But rather than give you a story of my last year riding motorcycles, I'm just going to jump to the chase. After 4 1/2 months of riding, I decided I needed to start racing again, and bikes were going to be my outlet...
Race the 300? Nope... it costs too much to replace 5-6x a year.
So what to race? Minibikes were the final result.
So I took a class. For $50 they lend me a suit, a bike, and gave me a solid 2 hours of instruction on how to man-handle the tiniest bike known to man, and it was the most educational 2 hours ever.
In my first weekend... I crashed 11 times. That wasn't a typo.
fun fun... but im not exactly a small person... so the actual race was not bringing in the ladies.
Having enjoyed myself I went out and bought a CRF50 of my very own to go racing on... I seriously underestimated how bad I am at this. But so what, I had just completed my first legitimate race and it was excellent!
That's me... last off the start line since I outweigh everyone by about 40-80 lbs, at the first corner, I was already 5 seconds behind. I received the nick-name "Crash" that weekend.
And some video of the race:
M1GP 2013 Round 7 (Santa Maria) 50cup Full Race from M1GP on Vimeo.
That was all good an fun, but anyone who is willing to crash 11 times in a weekend is surely insane and willing to try something way above his own head right?
That's absolutely right!
So what better way to learn how to race than to do a lot of it. So with precisely 1 race under my belt on the CRF50... I decided to join a team for a 24 hour race on an NSR50... now the names don't mean much to most so let me put two pictures side-by-side.
The CRF is exactly as it would appear in the pics above... it is a bike for 5 year olds. The NSR is an actual race bike with a small motor. Even though it is the same size engine, it produces 2x the horse-power, but more importantly, it handles like a dream!
Now this bike was the team's bike and we'd barrowed it from one of our competitors who was cool enough to lend it to us... But, with virtually no racing experience, I proceeded leaped face first into a proper race and managed to log 5hrs and 30 minues of those 24 hours and completed on the order of 450 laps... I was tired. It was miserable, it was cold, it was exhausting, and I will definitely do it again. Quite the experience.
Picture my #1 fan took of me when she surprised me and came to watch me race.
But Mark, surely there are tales to tell of that race? There are, lots of funny tales, but I'm more interested in the future... the future is my own first season of racing. With my own NSR50 of my very own.
THUS this blog will continue to same technical discussions as before about the karts, but now it the dynamically complex world of motorcycles. I have spent about a year now just coming to grips with how tied together everything is on these machines of beauty, and while the karts to super fast and super aggressive, nothing can shake a stick at the fun and complexity of a motorcycle.
So I will end this first rebooting post with a short video of me taking out my new baby, Wren, out on the track. Onwards and follow the shiny Golden Helmet!
PS: I thought the helmet was yellow when I tried to buy it online, but it was too ridiculous to send back. So I went with it.