I knew if I sat on my thinking chair for long enough I'd come up with an easier way to do this. Remember, when doing dynamics, it is usually easier to determine the response, than it is to determine the deformation. My original approach was going to be the 'start easy and build up'. Well, starting at deformation rather than acceleration was a problem. By changing to the response approach, and breaking up where I determine certain values in the model (rather than all in one place), I was able to keep the computations simple. By breaking up how I determined certain parameters, I was also able to build in the coupling (the relationship between two changing parameters: i.e. how the change in one will effect the other) I needed for the model to behave realistically. It was my fear I would need to run certain data all over the model to implement this coupling. I my ego is growing rapidly since I got it all to work on the first try. In hind-site, this was really easy.
Validation Case (i.e. test that it works/sanity check)
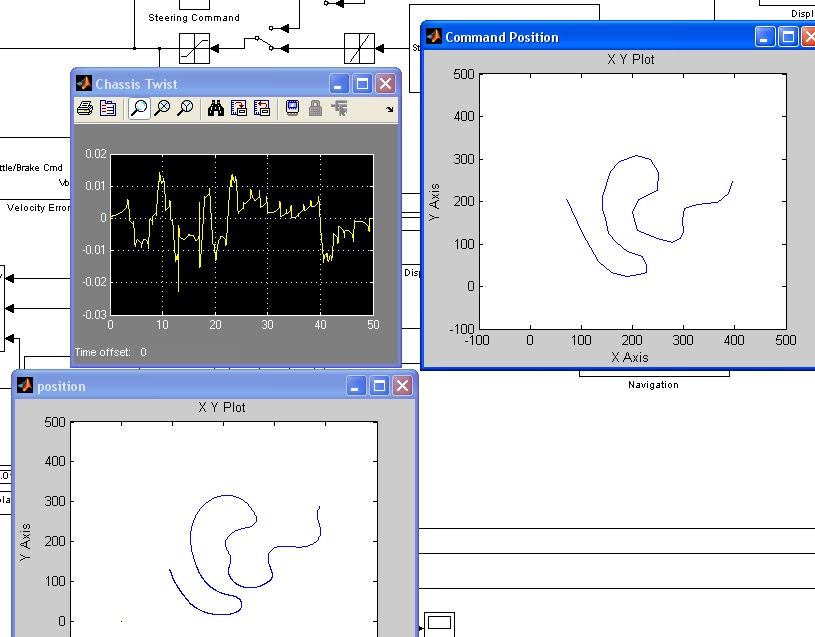
So here are two graphs as usual. The test I conducted to ensure the chassis was actually twisting how it should. Additionally, with this twist the deformation of the tires should behave as you'd expect when you 'lift' up a tire. So I would be looking for the other three tires to support the additional load. Imagine that I have the kart resting on the ground. Next, I remove a 1/4inch chunk of the ground from underneath the front left tire. So at the start of the simulation, the kart is all level and even, but the front left tire has no support, once the simulation starts, you can see in the left graph that the chassis begins to twist in the positive direction. Positive (as opposed to negative twist) in the coordinate system I am using is the left wheel going up and the right wheel going down. EDIT: So before the twist angle appeared to be backwards, I had come up with a "who's twisting who" explination, but it didn't sit well with me so I started investigating. Turns out my coordinate systems were inconsistent. I am using the aircraft coordinate system, with has Z-axis pointing down. Normally this doesn't trip me, but when I told the code my center of gravity was 8.5inchs +Z.... that's 8.5inches in the ground. So there's the fix and now the plots look correct.


Now with the chassis twist angle implemented, the next step will be:
-Improve the tire models to account for the effects of changing camber angles
-Figure out how to make the rear tires spin at the same speed (to create the solid rear axial).
These two items are particularly important in determining grip since one of the MAJOR tuning features of a kart, is changing this chassis twisting stiffness.
How Does Chassis Twisting Stiffness Effect Grip
The idea behind adjusting this stiffness is to allow the inside rear tire to lift on the ground easily enough in a turn. This is important because the axial that drives the rear tires is solid and can't accommodate the difference in distance traveled by the outside and inside tires. Since the outside tire will have substantially more weight on it than the inside, that is the tire that will stick, thus the inside tire will be trying to turn FASTER than the ground it is on.
"Wouldn't that produce a forward thrust" Some might ask.
"Yes it would." I respond
"Wouldn't that make you go faster and give you more grip than having the tire off the ground?" Sound would ask
"Yes it would." I respond.
"How is that bad?" Some would ask.
To which I respond, the force created by the inside tire would try to TURN the kart the opposite direction it is trying to turn. This is annoying not because it would require more effort to turn the kart, but also because it will push your front tires beyond their limit of grip, which then makes you lose control and spin out. Touching down the inside rear wheel essentially increases the lateral load your front tires are supporting.
On the flip side of that coin, is if you make the chassis too lose, you allow the rear end to lift off higher and higher. This rotation changes the camber angle of the rear tires (camber angle is the angle between the ground and the axial). This change in camber changes how the tire makes contact with the ground and how the load is spread out over the contact patch. Normal street tires are pretty narrow and more-or-less round from inside to outside; thus, don't easily feel the effects. Wide racing tires however are VERY flat from inside to outside. So changes in camber angle can easily lift and entire section off the ground. Thus if we allow the kart to lift up too high, the camber will reduce the grip available to the rear tire. You know this is happening when the rear end seems to 'skip skip skip skip' in long fast turns. The kart is pretty much flat and has high grip, twists and twists, loses grip and the rear comes out, kart flattens out and has high grip again.... skip skip skip. This is this EXACT case I will try to recreate to validate my model once I get all the needed components.
I LOVE MATH, I still have squat for experience and with these tools, I will be able to 'theoretically' set-up my kart optimally for tracks I will have never driven at. Mind you, the math can never be as accurate as the real thing, so 'optimal' should be taken with a grain of salt. An expression in the engineering world is "Put crap in. Get crap out" i.e. the results are only as good as the model you make. Progress is going very rapidly, but it will be a very long time until I reach this optimal point.
So until next time,
-S
Validation Case (i.e. test that it works/sanity check)
So here are two graphs as usual. The test I conducted to ensure the chassis was actually twisting how it should. Additionally, with this twist the deformation of the tires should behave as you'd expect when you 'lift' up a tire. So I would be looking for the other three tires to support the additional load. Imagine that I have the kart resting on the ground. Next, I remove a 1/4inch chunk of the ground from underneath the front left tire. So at the start of the simulation, the kart is all level and even, but the front left tire has no support, once the simulation starts, you can see in the left graph that the chassis begins to twist in the positive direction. Positive (as opposed to negative twist) in the coordinate system I am using is the left wheel going up and the right wheel going down. EDIT: So before the twist angle appeared to be backwards, I had come up with a "who's twisting who" explination, but it didn't sit well with me so I started investigating. Turns out my coordinate systems were inconsistent. I am using the aircraft coordinate system, with has Z-axis pointing down. Normally this doesn't trip me, but when I told the code my center of gravity was 8.5inchs +Z.... that's 8.5inches in the ground. So there's the fix and now the plots look correct.
Here's a corrected chart. I left the one below (even though it is backwards) to illustrate the validation case.
So with that justification of my results I'll now post yet another picture. Chassis Twist Angle on the left (in radians), and Tire Deformation on the right (in inches). As you would expect, the front right tire (magenta/purple) has had to deform noticeably more to compensate for the front left tire, not supporting any load. The other two rear tires also increased in deformation, but not as notedly.

-Improve the tire models to account for the effects of changing camber angles
-Figure out how to make the rear tires spin at the same speed (to create the solid rear axial).
These two items are particularly important in determining grip since one of the MAJOR tuning features of a kart, is changing this chassis twisting stiffness.
How Does Chassis Twisting Stiffness Effect Grip
The idea behind adjusting this stiffness is to allow the inside rear tire to lift on the ground easily enough in a turn. This is important because the axial that drives the rear tires is solid and can't accommodate the difference in distance traveled by the outside and inside tires. Since the outside tire will have substantially more weight on it than the inside, that is the tire that will stick, thus the inside tire will be trying to turn FASTER than the ground it is on.
"Wouldn't that produce a forward thrust" Some might ask.
"Yes it would." I respond
"Wouldn't that make you go faster and give you more grip than having the tire off the ground?" Sound would ask
"Yes it would." I respond.
"How is that bad?" Some would ask.
To which I respond, the force created by the inside tire would try to TURN the kart the opposite direction it is trying to turn. This is annoying not because it would require more effort to turn the kart, but also because it will push your front tires beyond their limit of grip, which then makes you lose control and spin out. Touching down the inside rear wheel essentially increases the lateral load your front tires are supporting.
On the flip side of that coin, is if you make the chassis too lose, you allow the rear end to lift off higher and higher. This rotation changes the camber angle of the rear tires (camber angle is the angle between the ground and the axial). This change in camber changes how the tire makes contact with the ground and how the load is spread out over the contact patch. Normal street tires are pretty narrow and more-or-less round from inside to outside; thus, don't easily feel the effects. Wide racing tires however are VERY flat from inside to outside. So changes in camber angle can easily lift and entire section off the ground. Thus if we allow the kart to lift up too high, the camber will reduce the grip available to the rear tire. You know this is happening when the rear end seems to 'skip skip skip skip' in long fast turns. The kart is pretty much flat and has high grip, twists and twists, loses grip and the rear comes out, kart flattens out and has high grip again.... skip skip skip. This is this EXACT case I will try to recreate to validate my model once I get all the needed components.
I LOVE MATH, I still have squat for experience and with these tools, I will be able to 'theoretically' set-up my kart optimally for tracks I will have never driven at. Mind you, the math can never be as accurate as the real thing, so 'optimal' should be taken with a grain of salt. An expression in the engineering world is "Put crap in. Get crap out" i.e. the results are only as good as the model you make. Progress is going very rapidly, but it will be a very long time until I reach this optimal point.
So until next time,
-S
No comments:
Post a Comment